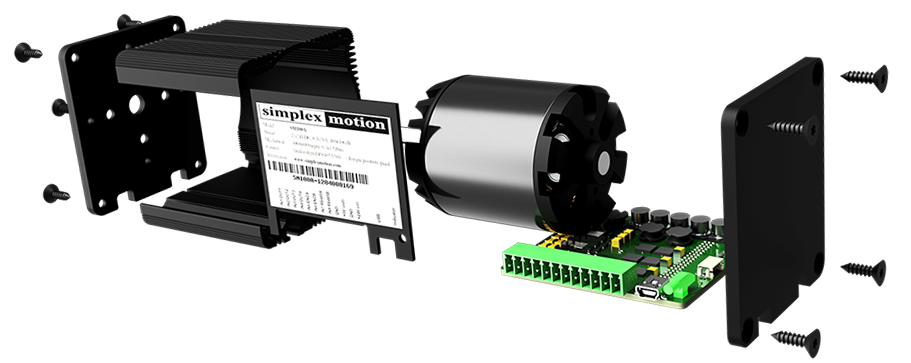
Integrated Servomotor – All in one
- Electric motor
- Position feedback sensor
- Motion controller
- Motor drive power electronics
- Digital and/or analog inputs and outputs
- Communication interface
- No extra housing keeps weight and size down
- No moving parts except motor axis
Small footprint – Allowing for tight integration
Open frame design without housing enables very tight integration into your system.
High torque vs. size and weight
Much higher torque-to-weight and torque-to-size ratio compared to conventional servomotors.
Precise control
- Speed control from 0 rpm
- High encoder resolution with 4096 positions/turn
- Real-time output torque measurement
Simple setup
Configure movement patterns, speed, ramps, and I/O using the Simplex Motion Tool software.
Energy efficiency
- 50% higher efficiency than regular DC motors
- Up to 10x more efficient than stepper motors
Three basic run modes
Easy to set limits
- Torque
- Speed
- Acceleration
- Deceleration
Multiple I/Os
- Up to 8 Digital inputs
- Up to 4 Analog inputs
- Up to 4 Digital outputs
- Modbus RTU
- CAN
Stand alone setup
- Homing using torque or external sensors
- I/O triggers and controls (Digital and PWM)
- Programmable movement patterns
Advanced running modes
- Events: Trigger actions on speed, torque, etc.
- Sequences: Repeat movement cycles
- Master-Slave synchronization
- Step/Direction control
- Encoder signal input/output
- Analog signal control
- Servo (R/C) PWM control
More advanced running modes
Custom C-code development using Simplex API. Remote access also supported (Windows, Mac, Linux).